This post is in Norwegian. It should be possible to get most of the gist from it if you don’t speak norwegian, or you could try one of the many other explaination of the setup available on the web.
DMR – Hytera korrekt oppsett.
For denne forklaringen brukes en Hytera PD985 med GPS. Alt som er forklart her gjelder for PD6, PD7 og PD9, samt det meste for de noe enklere PD4 og PD5 radioene til Hytera. For mobilstasjoner mangler det ett par små steg. Observer at PD4 og PD5 serie har egen utgave av programeringssoftware, samt andre nummer for firmware. Man kan annta at nye radioer fra forhandler leveres med en av de siste utgavene av firmware. For samtlige radioer er det helt nødvendig å ha tilgang på programeringskabel, selv om de fleste innstillingene kan settes via tastaturet. For å se bildene bedre, kan du høyreklikke på de, og velge “åpne bildet i ny fane”.
Last ned og innstaller siste utgave av Customer Programming Software (CPS) samt Subscriber Batch Upgrade (SBU) fra: https://www.hamdigitaal.nl/hytera-software-1/ og https://www.hamdigitaal.nl/hytera-firmware/
Dersom du ikke har en digital ID fra før, får du en her: https://register.ham-digital.org/
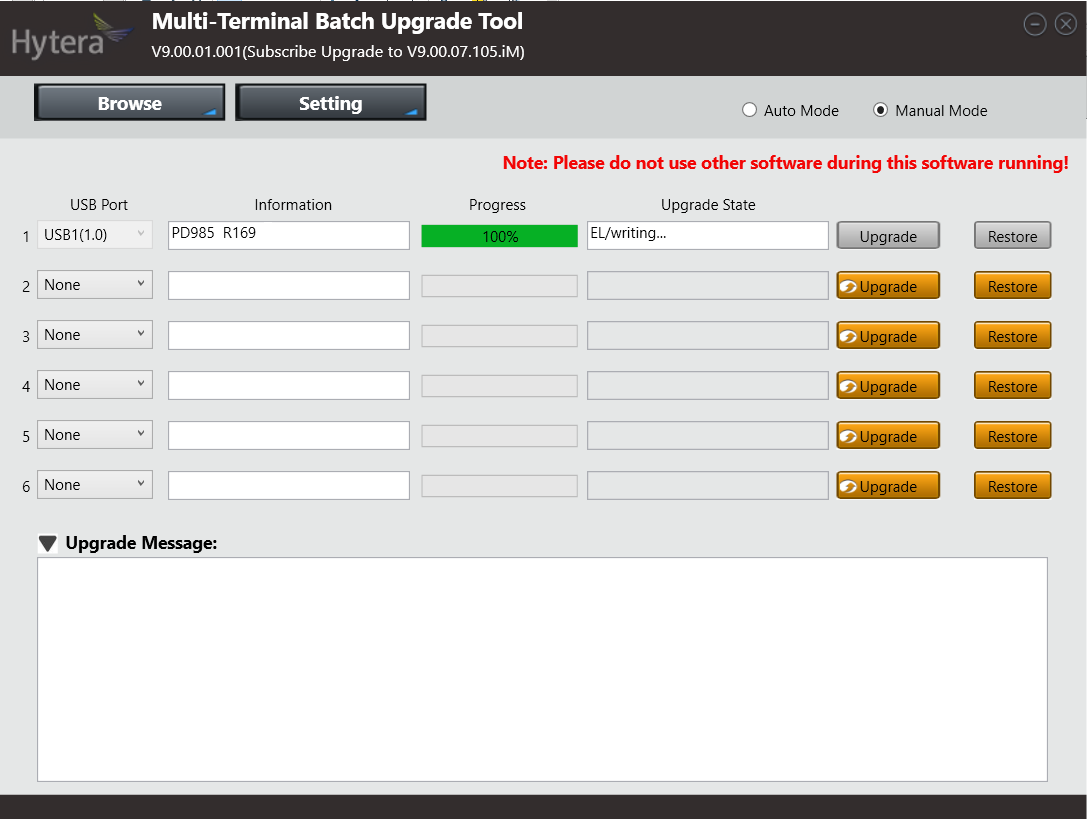
For å oppdatere firmwaren i radioen, kjør SBU. Dette er ett program som stiller store krav til tilgjengelig minne i radioen, slik at det er en fordel å re-starte PC’en før du starter det programmet. Koble radioen til PC, eventuell bryter på kabelen settes til DL, og sørg for at radioen er på før du starter programmet. Dersom radioen ikke går i oppdateringsmode automatisk, skru av radioen, hold inne orange «nødknapp» og PTT når du skrur på radioen. Oppdatering av firmware bør gjøres hver gang CPS oppdateres, ellers vil det være umulig å tilbakestille radioen til fabrikkinnstillinger. Dersom din radio har lavere firmware version enn V7.00 må det oppgraderes til V7 før det oppgraderes til siste versjon.
Steng SBU før CPS startes. Dersom det forsøkes å skrive til radioen med begge programmer aktive på PC, vil skrivingen feile. Sett bryteren på programeringskabelen tilbake til CPS før du forsøker å skrive til radioen.
Når CPS er startet trykk «Read». Da lastes oppsettet i radioen inn i programmet. Utvid Common og Conventional. XPT Trunking er for større linkede systemer med flere repeatere koblet sammen på samme sted. Dette brukes ikke til amatørradio.

Under Common – Settings:
Sett «Radio Alias» til ditt kallesignal + navn. I mitt tilfelle LA3PNA Thomas. Sett «Power-on Message Type» til «Radio Alias». Dersom du ønsker at det skal settes passord for å bruke, lese eller skrive til radioen, settes det her. Du kan velge norsk språk under «Language», vær obs på at enkelte oversettelser har noen feil.

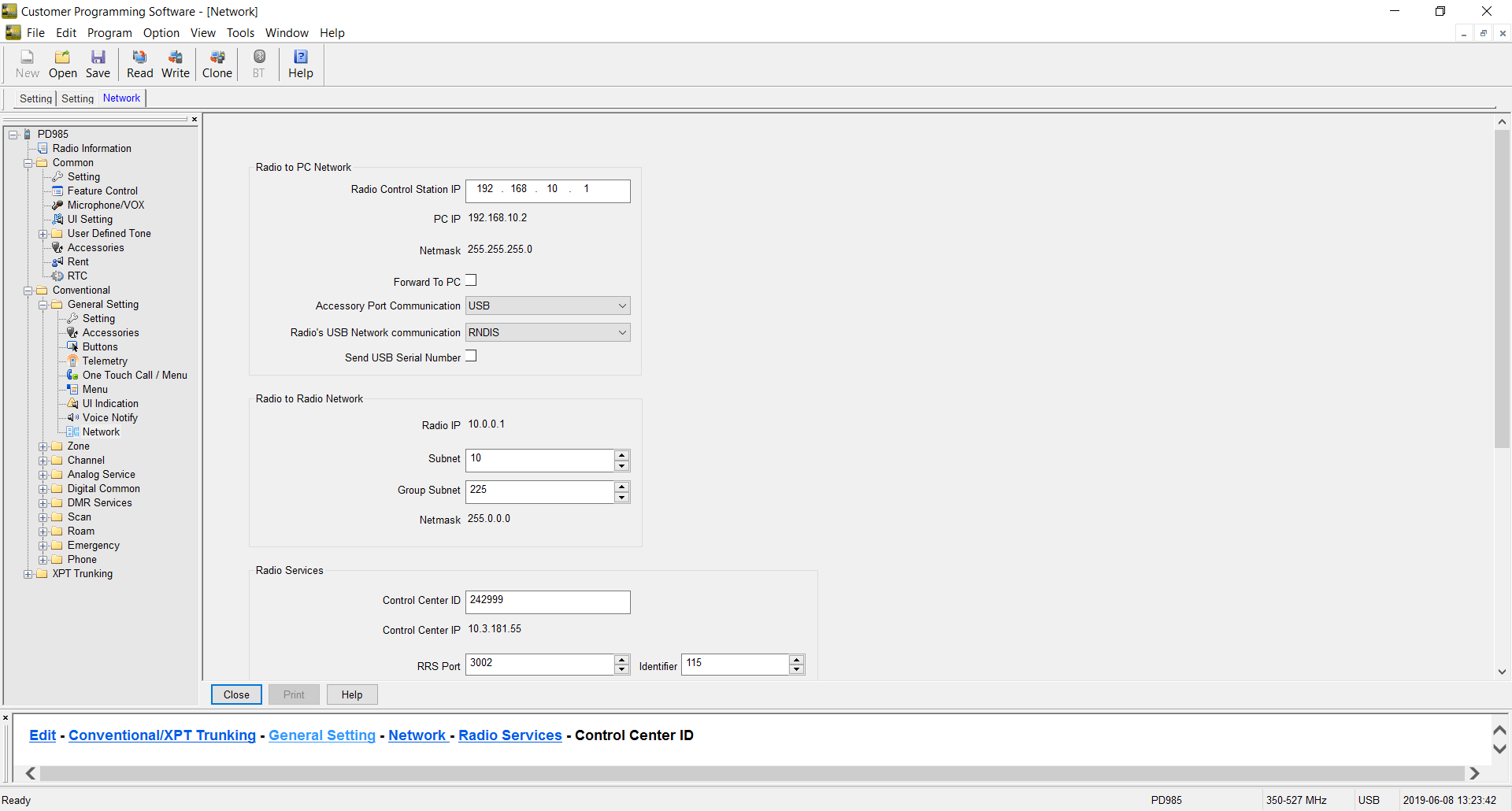
Under Conventional – General settings – Network:
Scroll ned til «Control Center ID» denne settes for Brandmeister i Norge til 242999. La alle andre innstillinger stå som de er.
Under Conventional – Digital Common – Basic:
«Radio ID» settes til din digitale ID. Denne fikk du tilsendt på e-post når du registrerte deg som digital bruker.
Lengere ned, under «miscellaneous» settes «Data Bearer Service» til «Compressed IP»
Huk og ut «Auto Add Contacts» dersom du ønsker at de du hører på luften, automatisk skal legges til som kontakter i kontaktlisten.

Det neste er å definere «kontakter». Dette er både de talegruppene vi ønsker å bruke, og personer vi sakker med. For enkelhets skyld vil jeg kun definere den nasjonale talegruppen 242, men det finnes mange andre som brukes. Lokalt bruker vi ID til en repeater (242650) slik at vi alltid kommer ut på den lokale repeateren, selv om vi skulle være på ett annet sted. Det er en fordel å se i Brandmeister for de lokale repeaterene du definerer. Både ID og at du velger rett tidsluke finner du i Brandmeister. Dersom du ikke har rett tidsluke, vil repeateren dynamisk linke til det tidsluke du bruker. Resultatet av dette er at du legger beslag på begge tidsluker, og hindrer en annen QSO som kunne gått samtidig.
Under Conventional – DMR Services – Contact:
Legg til «Nasjonal 242» som «Group call» og med Call ID «242»
Ut over dette trenger vi ikke å definere noen flere kontakter nå, vi kan definere de når vi legger til flere kanaler.

Under Conventional – Channel – Digital Channel:
Velg «CH D1», og rediger denne slik at den passer med din lokale DMR repeater. Jeg har valgt å kalle min kanal LD3DV 242, siden dette er LD3DV, i talegruppe 242.
Start med å sette korrekt frekvens. Dette er nødvendig for å få huket ut «Multisite IP Connect».
Sett RX group list til «None», TX contact name til «Nasjonal 242», «Location Info Revert Channel» og «RSS Revert Channel» settes til «Selected». «Emergency system» og «Phone system» settes til «None». «Power level» settes til det som måtte passe. «TX admit» settes til «Channel Free». «TX time out time» settes til ett passende nivå. 60 sekunder er ofte litt lite for amatørtrafikk.


Under Conventional – Zone – Zone1:
Zone er en utvidelse av kanallisten hvor man kan ha en zone for repeatere, en for simplex osv.
I dette tilfellet velger vi bare å fjerne alle kanalene vi ikke har redigert, så «LD3DV 242 står tilbake alene.
[9]
Dersom du nå laster opp denne konfigurasjonen til radioen, skal du kunne prøve den mot den nasjonale talegruppen.
Samme prosedyre med innlegging av kontakt, kanal, og så i zone brukes for alle andre kanaler du ønsker å ha i radioen. Analoge kanaler kan fint blandes med digitale i samme zone.

For radioer med innebygget GPS:
For å få en knapp som sender GPS posisjon, velg Conventional – General Settings – Button, og sett «SK2 long» til «GPS Report».
Velg videre Conventional – General settings – Accessories og under «GPS trigger» huk av «Button». Her har du og muligheten til å sette at den automatisk sender posisjonsrapport etter en gitt tid eller avstand. Under «voice w/Location» huk av både «Voice w/Location» og «PTT». Da sendes posisjonen automatisk når du trykker inn PTT.
Tillegg 05/02-24: Dersom ikke DPRS (APRS) fungerer, skru av GPS data compression under General-> Settings -> Accesories